GNSS/RTK天线/高精度天线
12年卫星导航行业积累
全国服务热线:
188-2651-7057
12年卫星导航行业积累
188-2651-7057

2025-05-14
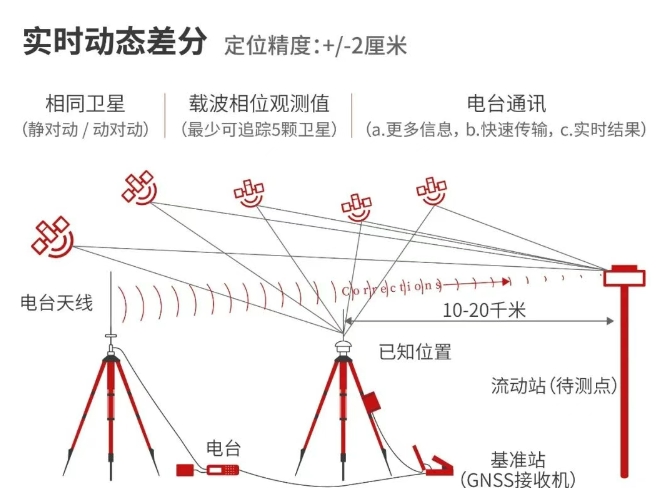
RTK(实时动态定位,Real-Time Kinematic)是一种高精度的卫星导航定位技术,通过差分校正方法,将GNSS(全球导航卫星系统)的定位精度从米级提升至厘米级(通常1-3厘米),广泛应用于测绘、无人机、自动驾驶、精准农业等领域。
概述
1. RTK的基本原理
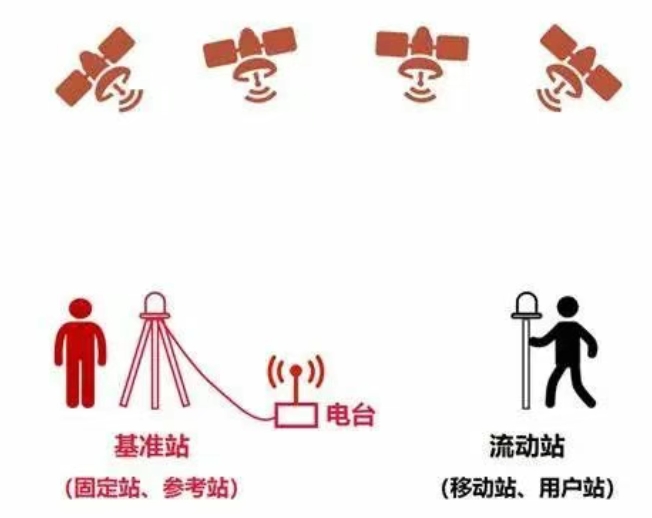
RTK的核心思想是利用**基准站(参考站)和流动站(移动接收机)**的协同工作,消除GNSS信号中的公共误差(如电离层延迟、卫星钟差、轨道误差等),实现高精度定位。
关键组成部分
1. 基准站(Base Station)
固定安装在已知坐标点(精确测量获得)。
实时接收GNSS信号,计算误差修正数据(差分改正数)。
通过无线电(UHF)、4G/5G或网络RTK(CORS)发送给流动站。
2. 流动站(Rover)
移动设备(如无人机、农机、测量仪)。
接收GNSS信号和基准站的差分数据,实时计算高精度位置。
3. 数据通信链路
无线电(短距离,如UHF电台)。
网络RTK(长距离,如NTRIP协议+4G/5G)。
2. RTK的工作流程
1. 基准站采集数据
基准站接收GNSS信号,计算伪距和载波相位观测值。
2. 误差计算与差分改正
基准站对比已知坐标和GNSS观测值,计算误差修正参数。
3. 数据发送至流动站
通过无线电或网络传输差分数据(RTCM格式)。
4. 流动站实时解算
结合自身GNSS观测值和差分数据,进行高精度定位。
3. RTK的关键技术
(1) 载波相位差分
GNSS信号包含伪距(C/A码)和载波相位(L1/L2频段)。
RTK利用载波相位(波长更短,精度更高)进行解算。
需解决整周模糊度(Integer Ambiguity)问题(通过LAMBDA算法等)。
(2) 网络RTK(CORS)
替代单基准站,利用多个基准站组成的连续运行参考站系统(CORS)。
通过云端计算区域误差模型(如VRS、MAC、FKP),提高覆盖范围和可靠性。
适用于大范围高精度应用(如自动驾驶、测绘)。
(3) 多频GNSS支持
双频(L1+L2)或三频(L1+L2+L5)接收机可减少电离层延迟影响,提高稳定性。
4. RTK的精度与性能
5. RTK的应用领域
(1) 测绘与工程测量
地形测绘、道路放样、建筑施工(如全站仪替代方案)。
地籍测量、矿山监测。
(2) 无人机(UAV)与航测
高精度航线规划(如倾斜摄影、LiDAR测绘)。
农业植保无人机(精准喷洒)。
(3) 自动驾驶与高精地图
车辆定位(结合IMU+RTK,实现车道级导航)。
高精地图采集(如百度、高德地图的测绘车)。
(4) 精准农业
农机自动驾驶(如无人拖拉机、播种机)。
变量施肥、精准灌溉。
(5) 地质灾害监测
滑坡、沉降监测(结合GNSS+RTK长期观测)。
6. RTK的局限性
1. 依赖基准站
距离基准站越远,精度下降(通常有效范围<10km,网络RTK可扩展)。
2. 初始化时间
需解决整周模糊度,冷启动时可能需要数十秒。
3. 信号遮挡影响
高楼、树林等环境可能导致失锁,需结合IMU/视觉辅助。
4. 成本较高
专业RTK设备价格远高于普通GNSS接收机。
7. RTK的未来发展趋势
1. 多系统融合
支持北斗/GPS/Galileo/GLONASS多频多系统,提高可靠性。
2. 低功耗小型化
芯片化RTK模块(如u-blox F9P),推动消费级应用(如无人机、机器人)。
3. AI+RTK
结合机器学习优化模糊度解算,缩短初始化时间。
4. 5G+RTK
利用5G低延迟特性,提升网络RTK的实时性。
RTK是当前高精度定位的核心技术,通过载波相位差分将GNSS精度提升至厘米级,广泛应用于测绘、无人机、自动驾驶等领域。未来,随着多频多系统支持、AI优化和5G通信的发展,RTK将在更多场景中发挥关键作用。







手机:188-2651-7057(晏生) 电话:0755-23205219
邮箱:yqh@hx-iot.com
公司地址:深圳市宝安区西乡固戍二路新安第二工业区C10栋西面2-5楼
工厂地址:江西省宜春市袁州区城南工业园环城南路667号
官网网址:www.hxrf-antenna.com










 关注我们
关注我们 188-2651-7057
188-2651-7057 在线客服
在线客服 企业邮箱
企业邮箱